
Comment faire pour que deux trains ne se rattrapent pas sur mon réseau?
Tout comme dans la réalité, le principe est celui du bloc. Le bloc interdit à un train de pénétrer dans un secteur (ou canton) dans lequel se trouve déjà un autre train. Le terme de bloc vient des débuts du chemin de fer. Les premiers systèmes de sécurité étaient très simple: à chaque canton était attribué un « bloc » de bois que le mécanicien devait prendre avec lui en entrant dans le canton. Seul le train en possession du bloc de bois avait le droit de circuler. Le terme de bloc est resté.
Tout comme pour les trains réels, le modéliste qui souhaite une exploitation automatique ou semi-automatique de son réseau devra installer un système de bloc. Plutôt que de présenter des systèmes existants, je voudrais ici montrer quelques principes de fonctionnement et quelques exemples réalisables à l’aide de relais et quelques autres composants simples. Ces exemples s’appliquent en principe uniquement à l’alimentation analogique.
J’invite le lecteur de se familiariser d’abord avec la fiche pratique n°5, alimentation et section d’arrêt.
| Généralités | 
Explication: J’ai découpé une ligne à voie unique sur laquelle les trains circulent dans un seul sens en 4 cantons, A-B-C-D. Lorsque tous les cantons sont libres, tous les signaux sont ouverts (symbolisés par les sémaphores avec une palette levée). Imaginons un train lent, représenté par la locomotive à vapeur, qui circule sur cette voie. Dès qu’il a quitté le cantons D (deuxième ligne), un automatisme doit fermer le signal qu’il vient de franchir: ainsi, même si un train plus rapide arrive derrière, il devra s’arrêter, évitant le rattrapage. Au moment où notre train quitte le canton C, un même automatisme doit fermer le signal qu’il vient de franchir. Simultanément, comme le canton C est à nouveau libre, le signal entre les cantons C et D peut être réouvert et un train s’engager sur le canton C. Il est représenté ici par la locomotive électrique et on admettra qu’elle roule plus vite que la locomotive à vapeur. Comme le train électrique est plus rapide, il arrive au bout du canton C avant que le train à vapeur n’ait quitté le canton B. Il doit donc s’arrêter au signal. On notera que le signal entre les cantons C et D est fermé, puisque le train électrique occupe le C. Lorsque le train à vapeur a quitté le canton B (dernière ligne de l’illustration), il faut que le signale entre B et A soit mis au rouge. Le signal entre C et B peut être réouvert et le train électrique avancer. C’est ce mécanisme que nous allons chercher à installer sur un réseau miniature pour éviter que deux trains ne se rattrapent.
|
|||||||||
| Détection | Comme indiqué ci-dessus, un système de bloc est composé de sections ou cantons. Chaque canton doit avoir une zone télécommandable pour arrêter un train, combinée avec un signal lumineux (qui peut être omis pour les blocs cachés) et une détection de la présence ou du passage d’un train. Il est possible de monter un système de bloc soit en détectant le passage, soit en détectant la présence d’un train. Un dispositif qui détecte le passage d’un train est souvent appelé une pédale. Dans la réalité, ce sont par exemple des compteurs d’essieux.
Détection du passage du train/pédale Il existe plusieurs manière de détecter le passage d’un train. Certains producteurs proposent eux-mêmes leur propre système. Souvent les pédales toutes prêtes à être montées sont plus simple que les systèmes que l’on peut bricoler soi-même, mais aussi beaucoup plus chères. Voyons quelques exemples:
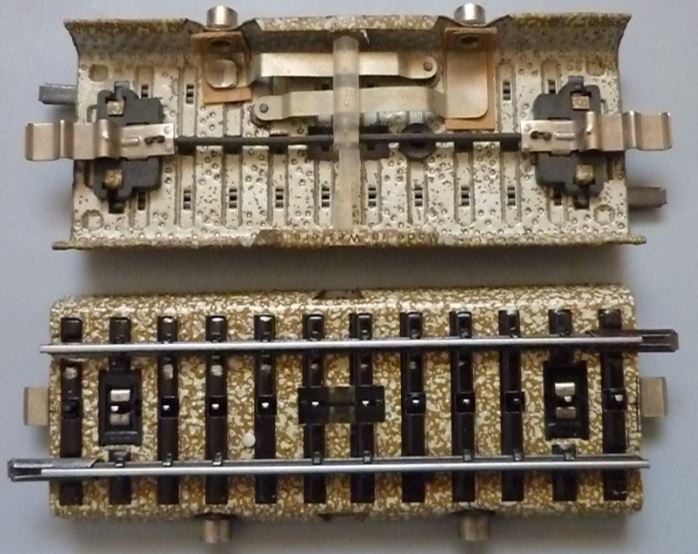
Détection de présence Contrairement à la pédale qui donne un signal lorsqu’un train franchit un point spécifique, la détection de présence indique la présence d’un train sur un canton aussi longtemps qu’un courant électrique est consommé sur le canton. Avec le système Märklin à alimentation centrale, avec les voies K et C, il est très facile d’isoler un rail de l’autre. Tant qu’un essieu conducteur ponte les deux rails, le contact et donné, ce qui peut par exemple activer un relais qui indique alors la position de voie « occupée ». Avec une alimentation en courant continu sur deux rails (de même qu’en numérique), cela n’est pas possible. On utilise alors en principe la détection de la consommation électrique. Aussi longtemps qu’un consommateur électrique se situe dans la zone, le contact est donné. Evidemment, si seule la locomotive consomme du courant, lorsque celle-ci aura quitté la zone, elle ne sera plus détectée. En revanche, chaque wagon éclairé sera à nouveau détecté. Il est aussi possible de « graphiter » les essieux des wagons (1 par wagon) afin qu’une consommation de quelques milliampères soit détectée.
Il peut aussi être utilisé pour une détection d’occupation en numérique, voire pour de la rétrosignalisation en lui ajoutant un module S88. |
|||||||||
| Principe | Schématiquement on peut représenter le principe du bloc de la manière suivante:
Sur l’illustration ci-dessus, les détecteurs de passage sont symbolisés par les cercles rouges. Les flèches de couleur indiquent la fonction de ces détecteurs. On constate ainsi que chaque détecteur doit simultanément:
Si on utilise un détecteur de présence, le système peut être représenté schématiquement ainsi:
Aussi longtemps qu’un train est détecté dans un bloc (ce qui est symbolisé par le trait rouge épais), le signal précédent est maintenu au rouge. Lorsqu’il n’y a plus de train détecté, le signal doit rebasculer automatiquement au vert. Ainsi, contrairement au système avec détecteur de passage où chaque signal peut avoir deux positions « stables », avec le détecteur de présence, on a une position par défaut qui est la position « voie libre », et une position temporaire « arrêt » lorsque le bloc est occupé. Cette différence se traduira par l’utilisation de relais bistables pour un bloc conçu avec détection de passage et de relais monostables pour un bloc conçu avec détection de présence. |
|||||||||
| La tête où la queue? | Si l’on choisit un système de détection de passage à l’aide d’ILS, il faudra installer un aimant dans chaque train. La solution la plus simple pour avoir un aimant dans chaque train, c’est de la mettre sous la locomotive. Mais est-ce vraiment la meilleures solution?
Si on choisit de remplacer la détection de la tête du train par une détection de l’ensemble du train, par exemple avec une barrière IR, on risque la situation suivante:
Le train 1 lent passe le signal puis active la détection, qui met au rouge le signal qu’il vient de quitter et au vert le précécent. Le deuxième train passe le premier signal et atteint la détection. Celle-ci doit mettre le signal qu’il vient de passer au rouge, mais en même temps, le train lent est encore en train d’activer la détection du signal de droite. Le signal de gauche reçoit par conséquent deux ordres contradictoires. Mais en même temps, le signal encore précédent le signal de gauche et libéré! Si le premier train est plus long que le deuxième et qu’il continue d’activer la détection alors que le deuxième a fini de passer le détecteur, le signal de gauche continuera d’être vert. Ainsi le troisième train entrera lui aussi dans le bloc et rattrapera le deuxième train au signal. Cette solution ne garantit pas non-plus une exploitation sûre.
|
|||||||||
| Cas pratique 1: bloc avec détection de passage par ILS |  Cette première illustration montre le cas détaillé d’un seul signal. On reconnaît les composants déjà utilisés dans ma fiche pratique sur l’alimentation et les sections d’arrêt. Cette première illustration montre le cas détaillé d’un seul signal. On reconnaît les composants déjà utilisés dans ma fiche pratique sur l’alimentation et les sections d’arrêt.
Cette illustration présente le cas d’alimentation analogique en courant continu par 2 rails. Le relais bistable (représenté par les deux rectangles avec une diagonale) commande deux inverseurs. L’un peut être utilisé pour les feux du signal. Par simplification du schéma, j’ai omis ici leur représentation (voir fiche pratique n°5 si le branchement n’est pas clair). L’ILS est représenté entre les voies par l’interrupteur entouré de l’ovale. J’ai ajouté encore sur le schéma une commande manuelle du bloc avec des boutons poussoirs, ce qui peut être très utile dans certains cas. Toutefois, il faut s’assurer qu’en mettant manuellement le signal au rouge, on ne libère pas en même temps le signal précédent, et réciproquement. C’est le rôle des deux diodes noires. En rouge, l’alimentation de la section d’arrêt, sur le rail droit dans le sens de marche. La position du relais correspond à un signal fermé et la zone d’arrêt n’est pas alimentée. La diode en rouge permet à un train qui circule dans l’autre sens (dans le cas d’une alimentation en courant continu, système 2 rails) de ne pas être influencé par le signal. La succession des blocs donne l’image suivante:
Pour ne pas surcharger le dessin, je n’ai plus représenté les boutons pour la commande manuelle de chaque signal, mais il n’est pas difficile de les rajouter. Sous le dernier wagon du train qui circule de droite à gauche, on voit l’aimant en rouge. Il vient de passer sur l’ILS qui a mis au rouge le signal de droite. |
|||||||||
| Cas pratique 2: bloc avec détection de présence | 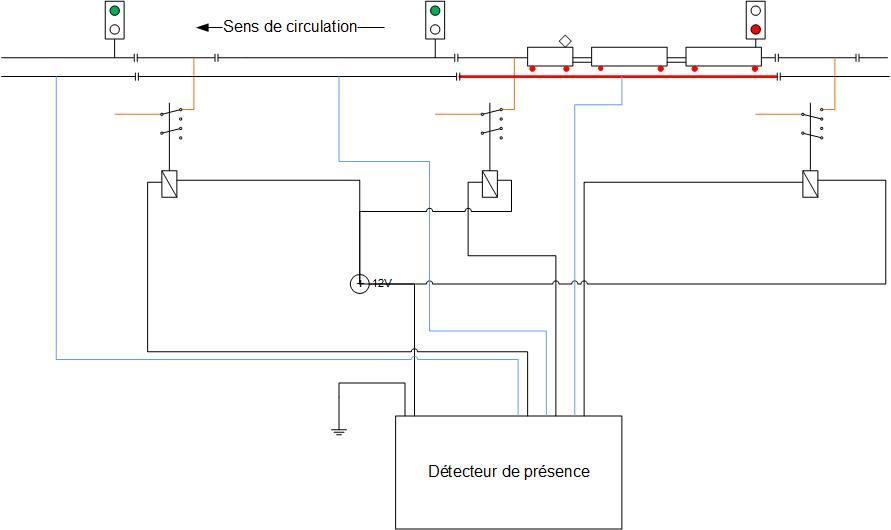
Explication: chaque canton est relié au détecteur de présence (ou d’occupation) et l’indicateur d’occupation est chaque fois relié au côté masse d’un relais monostable. Lorsque le relais monostable est activé (sur mon illustration c’est le cas de celui de droite), le signal est mis au rouge et le courant est coupé dans la zone d’arrêt. Quand le train quitte un secteur, le relais précédent n’est plus alimenté à la masse et il retombe, libérant alors le train. |
|||||||||
| Cas pratique 3: un bloc bi-directionnel | 
Ce cas pratique présente une réflexion pour une voie unique avec système de bloc qui fonctionne dans les deux sens. Bien évidemment, des trains successifs ne peuvent circuler que dans un sens à la fois et toute la construction se base en effet sur cette idée de base:
|
|||||||||
| Quelques exemples de blocs réalisés | Le bloc du Gothard
Notre réseau d’exposition des rampes du Gothard est exploité en digital. Plus précisément, nous pilotons les trains digitalement. Toutefois par simplification, nous avons décidé d’implémenter un bloc analogique et de positionner les blocs en zone invisible. Dès lors, les arrêts brusques et la perte des fonctions numériques ne nous posent pas de problème. En revanche, nous faisons parfois aussi circuler des trains-navettes avec voiture pilote en tête. Il a fallu trouver une solution qui permette de nous assurer que les trains sont toujours totalement en zone cachée avant qu’ils ne s’arrêtent, et ceci indépendemment s’ils sont tractés ou poussés. De plus, il fallait s’assurer qu’en cas de perte de wagons, les trains suivants s’arrêtent et qu’un train même tronqué sôit aussi arrêté au prochain bloc. Nous avons donc réalisé le bloc suivant:
Dans ce petit film, on voit le fonctionnement à partir de la minute 1.00. En option et dans le rectangle jaune est représentée une variante que j’ai utilisée pour le segment Biaschina. Ce dernier est en effet équipé d’un bloc dans la partie visible. Dans un permier temps, je l’avais équipé de la technique de freinage ABC (système Lenz). Afin que l’ordre de freinage soit reconnu par toutes les locomotives, j’ai remplacé l’ABC par un générateur de freinage qui donne un ordre d’arrêt à tout décodeur dans le secteur. Les modifications nécessaires sont:
Le résultat est visible dans cette petite vidéo. Le bloc sNs Le groupement modulaire sNs (spur-N-schweiz) a développé un système de bloc analogique assez intéressant et utilisable de manière modulaire. A la base c’est un bloc basé sur le principe de relais bistables commandés par des ILS avec un aimant sous le train, comme je l’ai décrit au cas pratique 1. Avec le temps le bloc a été développé de manière intéressante. Voici la liste des fonctionnalités ajoutées successivement bloc sNs:
La documentation complète du bloc sNs est disponible à cette adresse: http://www.spur-n-schweiz.ch/sns/streckenblock.html |
|||||||||








{kind=link}
{kind=link}
{kind=link}
{kind=link}