
Fiche pratique n°3: télécommander les aiguillages
L’objectif de cette page est de montrer comment on peut commander les aiguillages d’un réseau, que l’on ait des moteurs lents ou des solénoïdes. La fiche pratique ne traite toutefois pas de la commande numérique des aiguillages avec décodeurs pour accessoires, ni de l’utilisation de servos pour commander les aiguillages.
| Généralités | Il y a deux grandes familles de « moteurs » pour la commande des aiguillages: les solénoïdes et les moteurs lents.
|
|
| Explication des signes | 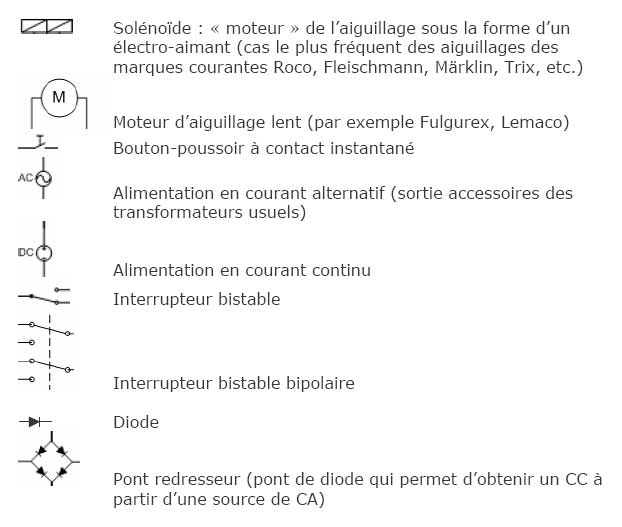 |
|
| Solénoïde |  Premier cas, le plus simple, la commande d’un solénoïde par deux boutons-poussoirs (contact fermant) fixé dans un tableau de commande (TCO): Premier cas, le plus simple, la commande d’un solénoïde par deux boutons-poussoirs (contact fermant) fixé dans un tableau de commande (TCO):
On utilise une source de courant alternatif (mais du continu fonctionne aussi), par exemple la sortie accessoire d’un transformateur usuel. Un câble en commun à tous les aiguillages. L’autre passe par le TCO et les boutons-poussoirs.
Lorsque les solénoïdes sont équipés d’interrupteurs de fin de course, il est possible de remplacer les boutons poussoirs par un interrupteur bistable. Cela a l’avantage de visualiser directement sur le TCO la position des aiguillages. Le montage est alors le suivant:
|
|
| Moteurs lents |  Contrairement aux solénoïdes, les moteurs « lents » ont besoin de courant continu pour fonctionner et c’est l’inversion de la polarité qui change le sens du moteur. Le montage à gauche montre schématiquement un inverseur bistable biploraire et l’alimentation du moteur. Contrairement aux solénoïdes, les moteurs « lents » ont besoin de courant continu pour fonctionner et c’est l’inversion de la polarité qui change le sens du moteur. Le montage à gauche montre schématiquement un inverseur bistable biploraire et l’alimentation du moteur.
On peut aussi utiliser du courant alternatif, mais il faut alors le redresser à l’aide de deux diodes. Le montage est encore plus simple, puisqu’il ne nécessite qu’un seul inverseur. Le câble de retour peut être commun à tous les aiguillages:
|
|
| La matrice à diode | On l’a vu ci-dessus, pour chaque aiguillage il faut deux boutons poussoirs ou un interrupteur. Petit exemple ci-dessous (par simplification, les solénoïdes ne sont pas dessinés à côtés des aiguillages, mais c’est bien là qu’ils se trouvent):
Cette entrée de gare à 4 voies V1-V4 nécessite 3 aiguillages A1 – A3. Il faut donc 6 boutons poussoirs. Et pour aller sur la voie 4, il faudra appuyer sur 3 boutons, à savoir 1D, 2D et 3D. Ne serait-ce pas plus comfortable de n’avoir qu’un seul bouton à presser pour diriger automatiquement les aiguillages concernés dans la bonne position? Il existe une solution, appelée matrice à diode ou commande par itinéraire.
Par exemple pour la voie 1, l’aiguillage 1 doit être dévié à droite et le 2 à gauche. La position du 3 est sans importance. Dans la colonne V2 on a donc des croix en 1D et 2G. A l’aide de cette matrice, on va pouvoir câbler les aiguillages en n’utilisant que 4 boutons poussoirs V1 à V4:
On note qu’il faut maintenant impérativement une alimentation en courant continu (ou un pont redresseur avec une alimentation en courant alternatif comme sur mon illustration). Chaque croix dans le tableau correspond à une connexion entre un bouton et un solénoïde:
Et les diodes dans tout ça? Reprenons le tableau ci-dessus. A chaque fois qu’une position d’un aiguillage peut être activée par plus qu’un bouton poussoir, il faudra y mettre des diodes. Autrement dit, à chaque fois qu’il y a plus qu’une croix dans une ligne, il faut mettre une diode entre le bouton poussoir et la connexion des câbles. Prenons l’exemple d’une entrée sur voie 4: A1 doit être en déviation à droite, A2 à droite et A3 aussi. S’il n’y avait pas de diode entre le bouton V3 et 1D, en appuyant sur V4, le courant allant en direction de 1D pourrait aussi aller sur 3G. Or l’aiguillage 3 recevrait alors simultanément un autre et un contre ordre puisque 3G et 3D recevrait du courant comme le montre le petit schéma ci-dessous:
|
|
| Itinéraires doubles | Prenons le cas d’une gare plus compliquée avec une ligne à double voie qui amène à une gare à 4 voies avec tous les itinéraires possibles:
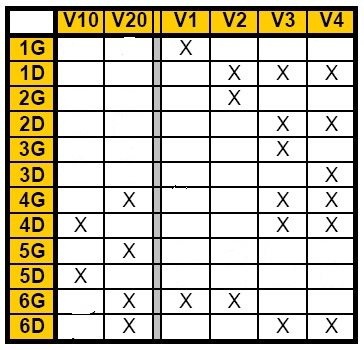
V10 et V20 sont les voies « d’origine » et V1-V4 les voies de destination. Les aiguillages 3 et 4 peuvent être remplacés par une traversée jonction double. Si elle a deux moteurs (exemple Peco) elle fonctionne comme deux aiguillages indépendants.
Cette fois, j’ai toutefois partagé le tableau en 2 avec d’un côté les origines (V10 et V20) et de l’autre les origines. Il faut toujours regarder les deux côtés en même temps. On constate que
la position d’A6 n’est importante qu’en relation avec V20 Cela nous donne le câblage suivant:
On voit bien que les aiguillages 4 et 5 qui sont déterminés par la V10/V20 sont câblés de l’autre côté. On voit aussi qu’A6 n’est alimenté que si V20 est sélectionné. Prenez le temps de voir ce qui se passe dans chacun des cas. Vous verrez ainsi qu’avec 6 boutons poussoirs, on peut commander 8 itinéraires différents, utilisants 6 aiguillages. |
 C’est le principe utilisé dans les petits pupitres de commande que l’on trouve chez différents fabricants, comme par exemple Märklin pour l’illustration.
C’est le principe utilisé dans les petits pupitres de commande que l’on trouve chez différents fabricants, comme par exemple Märklin pour l’illustration.

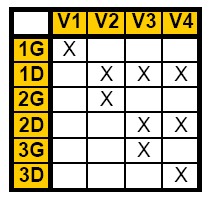 Représentons dans un tableau (matrice) les 3 aiguillages avec chaque fois leur deux positions (1G, 1D … 3G, 3D) en ligne et les 4 voies en colonne (V1-V4). Mettons maintenant une croix dans les positions des aiguillages correspondantes aux voies.
Représentons dans un tableau (matrice) les 3 aiguillages avec chaque fois leur deux positions (1G, 1D … 3G, 3D) en ligne et les 4 voies en colonne (V1-V4). Mettons maintenant une croix dans les positions des aiguillages correspondantes aux voies.
 A nouveau, on reporte dans un tableau les positions des aiguillages en fonction des voies.
A nouveau, on reporte dans un tableau les positions des aiguillages en fonction des voies.
Ce système de matrice à diodes m’intéresse, mais j’ai du mal avec un réseau constitué d’une petite gare terminus comportant une bifurcation principale et quelques voies de garage à contresens. Si les itinéraires entrées sont assez similaires à ceux des exemples de votre fiche, ceux retours et la gestion simultanée des zones de manœuvre me pose problème. Seriez-vous prêt à me donner un coup de main au vu du schéma de principe de cette gare ?
Luc
Bonjour,
Désolé d’intervenir avec une question hors sujet, mais je fais des recherches depuis ce matin, sans résultats, et votre site me paraît tout indiqué:
Je voudrais inversé la polarité d’un petit moteur de train, avec un interrupteur de lève-vitre à bascule possédant 4 broches de sortie.
J’ai donc en main: 1 pile 9 volts, un petit moteur et l’interrupteur 4 broches. Quelqu’un pourrait avoir la gentillesse de me fournir le schéma de branchement?
Remerciements.
Difficile comme ça, parce que les branchements ne sont pas toujours pareils sur les interrupteurs. Mais une chose est sûre, 4 broches, c’est probablement insuffisant pour inverser la polarité d’un train, il en faut en principe 6 et les brancher comme sur le schéma que l’on trouve ici: http://www.ziggysono.com/divers/inverseur.png, avec les fils « arrivées » qui viennent de la pile 9 volts, les deux fils de pontage et les deux sorties vers la voie.
Bonjour,
Je suis très intéressé par votre système pour la commande d’aiguillage. Pourriez vous me confirmer que l’on peut alimenter les aiguillages Roco en 12 V continu au lieu du 14V alternatif. Mes aiguillages sont des années 1985.
Merci de me répondre
Cordialement
BD
En principe oui.